
近日,工程学院硕士研究生李斯培以第一作者身份在在国际知名期刊Computers and Electronics in Agriculture(中科院一区Top期刊,影响因子8.9)发表题为“Research on Real Time Mapping and Transfer Learning Based 3D Semantic Segmentation of Unstructured Orchards”的研究论文。论文依托团队自主研发的智能感知无人飞行平台,该平台集成了激光雷达(LiDAR)、高精度全球导航卫星系统(GNSS)、惯性测量单元(IMU)等多源传感器,提出并实现了名为LIG-LIO的紧耦合激光雷达SLAM(Simultaneous Localization and Mapping),构建了面向非结构化果园环境的实时定位建图和语义地图生成系统,为丘陵山地非结构化果园三维点云地图的重建和语义映射提供了一种高效、准确的解决方案。
该研究针对无人机在复杂地形下建图时存在的Z轴(垂直方向)漂移,以及小样本数据导致果园语义分割精度不足等关键问题,提出了一种融合多传感器SLAM与迁移学习的研究方法。研究团队构建了名为LIG-LIO的紧耦合激光雷达SLAM框架,并在此基础上对PointNet++语义分割模型进行了针对性优化与改进,系统分析了GNSS数据在抑制建图垂直漂移中的作用机制,揭示了迁移学习在提升小样本果园场景分割精度方面的重要潜力,有效提升了复杂果园环境感知与果树个体信息自动化提取的精度与鲁棒性。
在实验流程上,研究首先利用搭载了激光雷达、高精度全球导航卫星系统等多种传感器的无人机平台,对丘陵山地非结构化果园开展多架次航测作业,获取高密度的原始三维点云。随后,为解决无人机在复杂地形飞行中易产生的地图垂直漂移问题,系统采用了一种多传感器紧耦合的建图方法,将高精度卫星定位信息与惯性导航及 LiDAR 里程计进行深度融合,对飞行姿态与轨迹进行持续约束与校正,从而构建出精度高、连续性好、在空间上全局一致的三维点云地图。
在环境理解与目标识别方面,研究引入了迁移学习策略:先利用PointNet++模型在大型公开三维点云数据集上进行预训练,使模型充分学习通用的空间几何特征与场景语义信息;再结合采集到的小样本果园点云数据进行微调与再训练,使模型能够针对果树、地面及人造设施等典型目标实现更为精准的识别与三维语义分割。基于分割得到的果树点云,研究进一步引入聚类与几何分析方法,实现单株果树的自动分割与编号,并自动计算每棵树的株高、冠幅以及中心位置等关键几何参数,完成由原始感知数据向结构化果树表型信息的自动化转换。研究结果表明,所构建的系统在复杂地形非结构化果园中的建图精度、语义分割精度以及单株参数提取稳定性方面均表现良好,可为果园生长监测、精准施药、产量评估等智能化管理任务提供可靠的数据支撑和技术保障。
图1 论文刊登
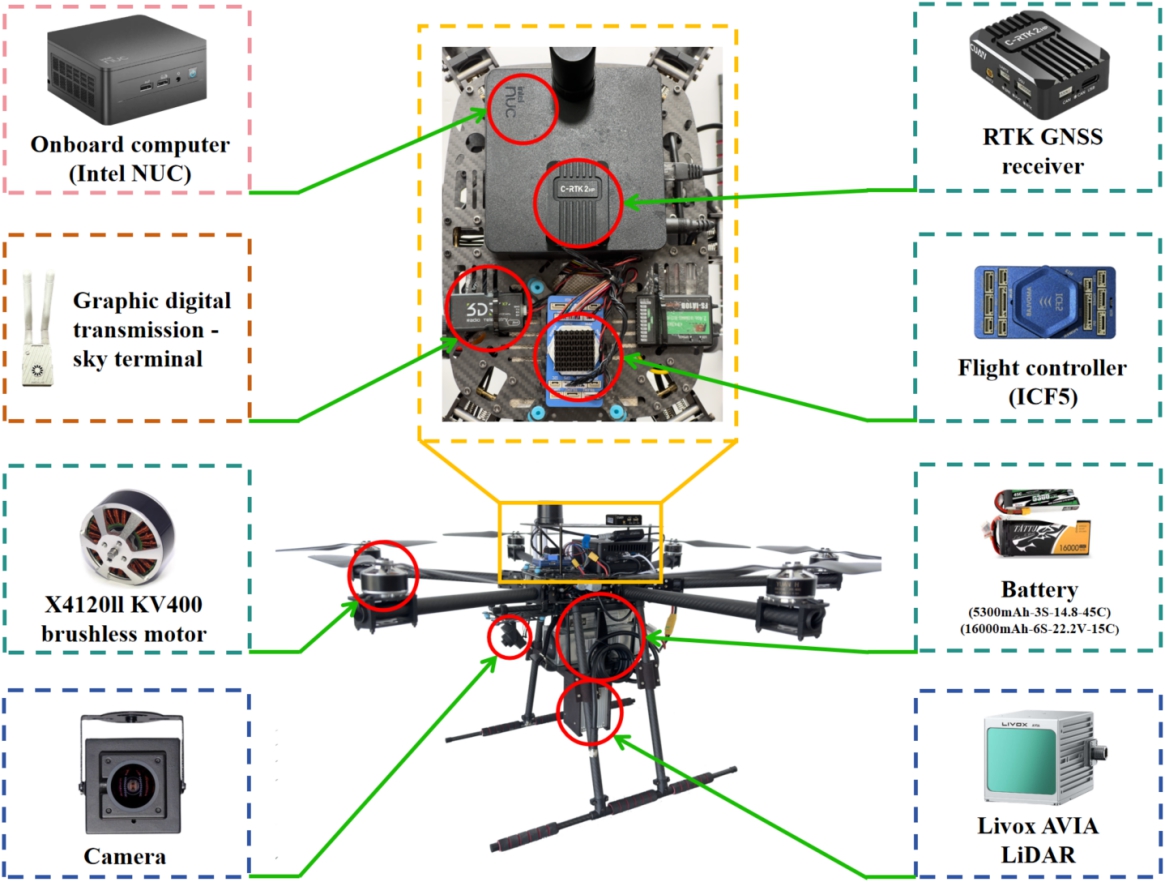
图2 智能感知无人机飞行平台
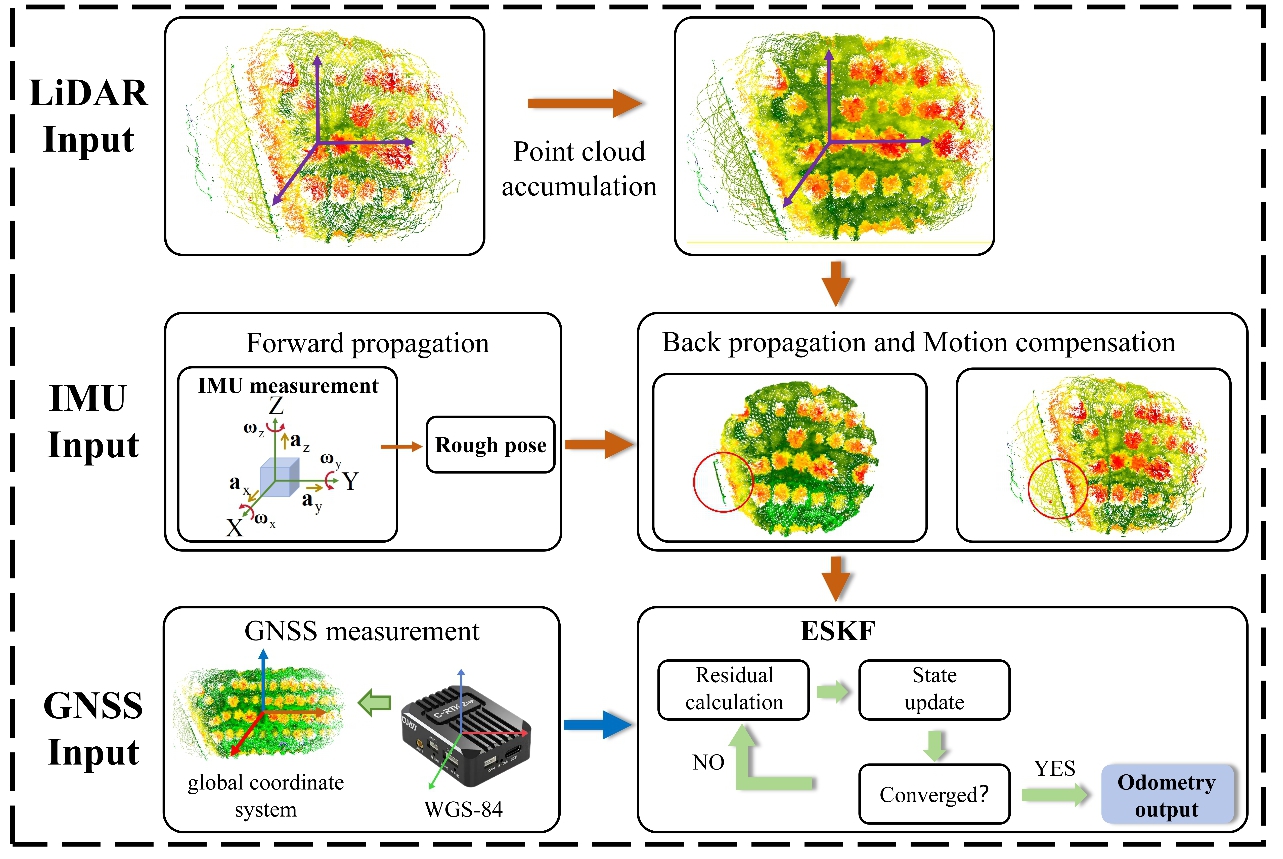
图3 LIG-LIO紧耦合激光雷达SLAM框架
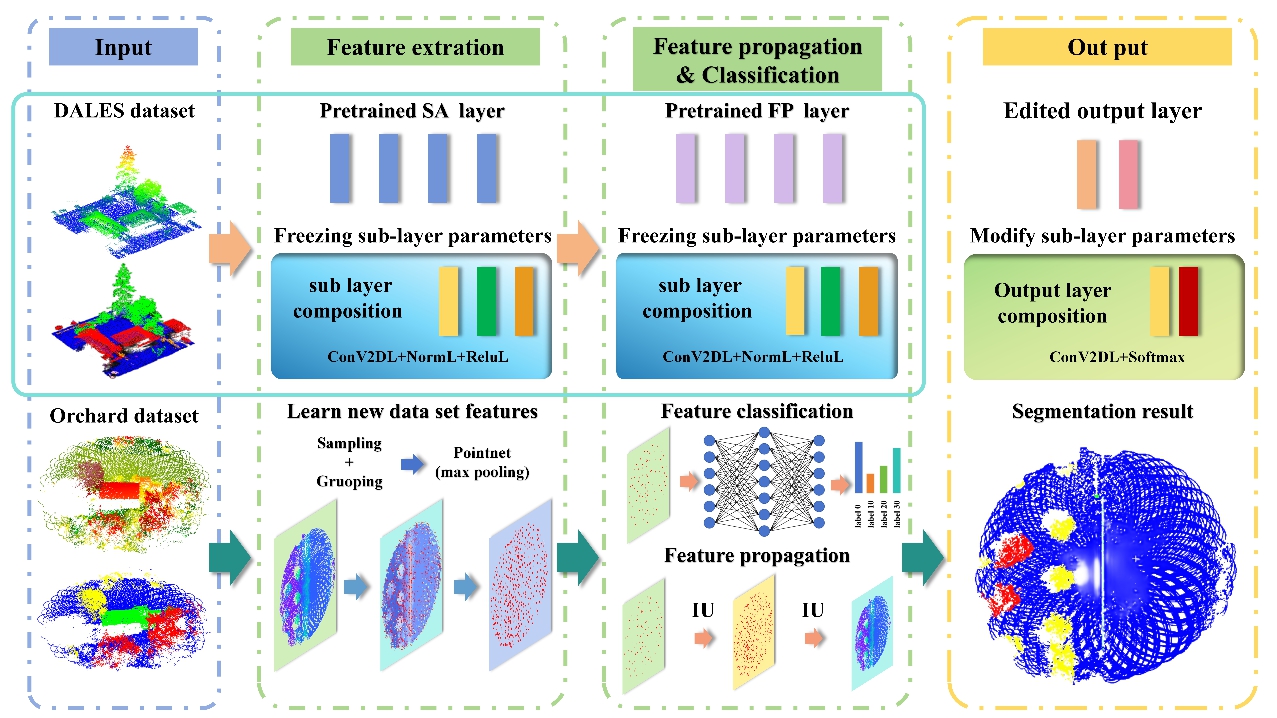
图4 基于迁移学习的网络模型
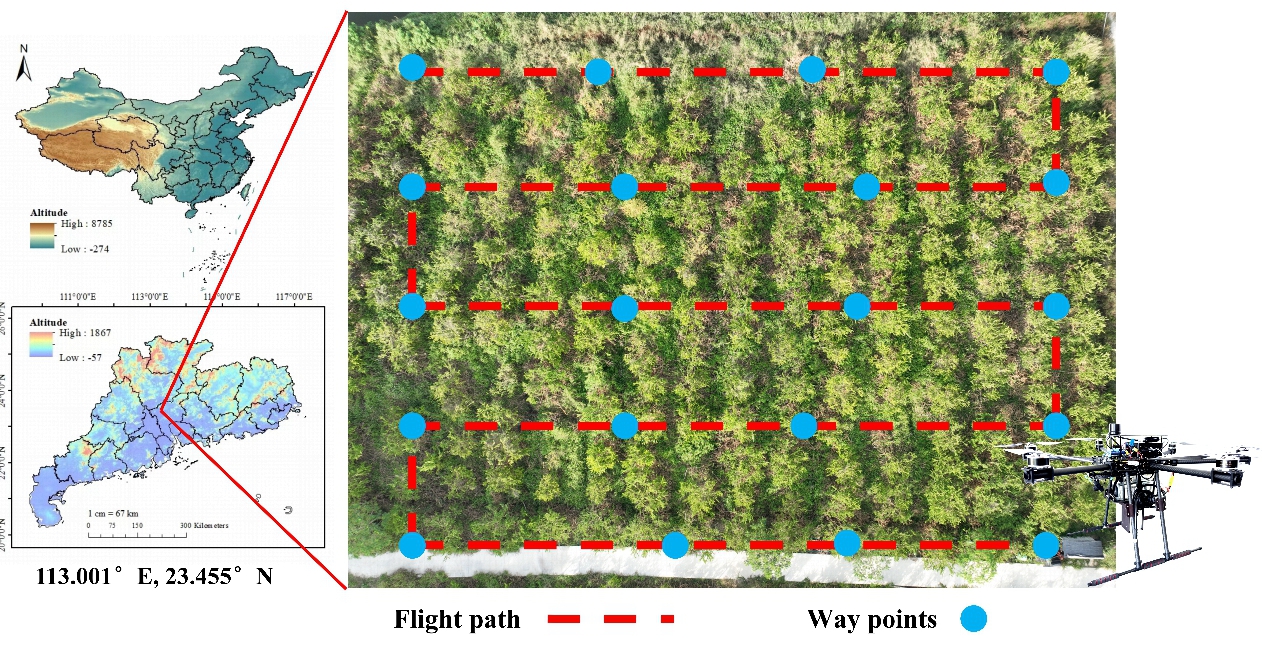
图5 实验地点与飞行路径规划
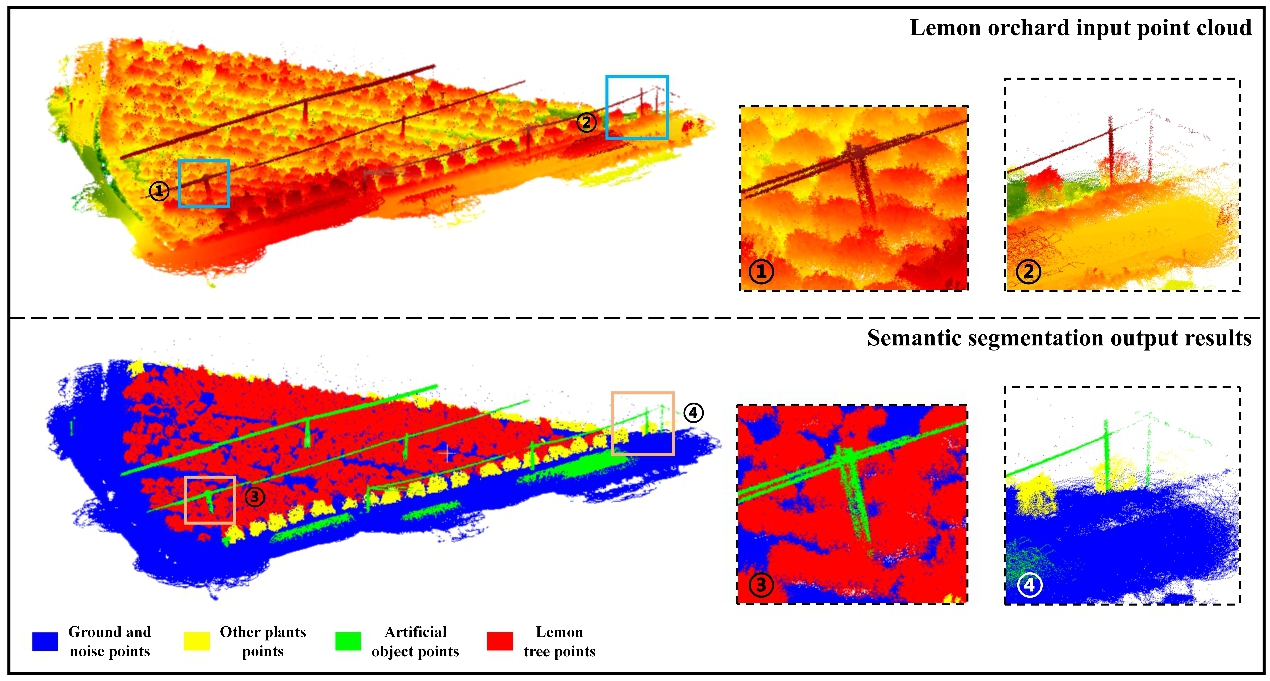
图6 语义分割结果
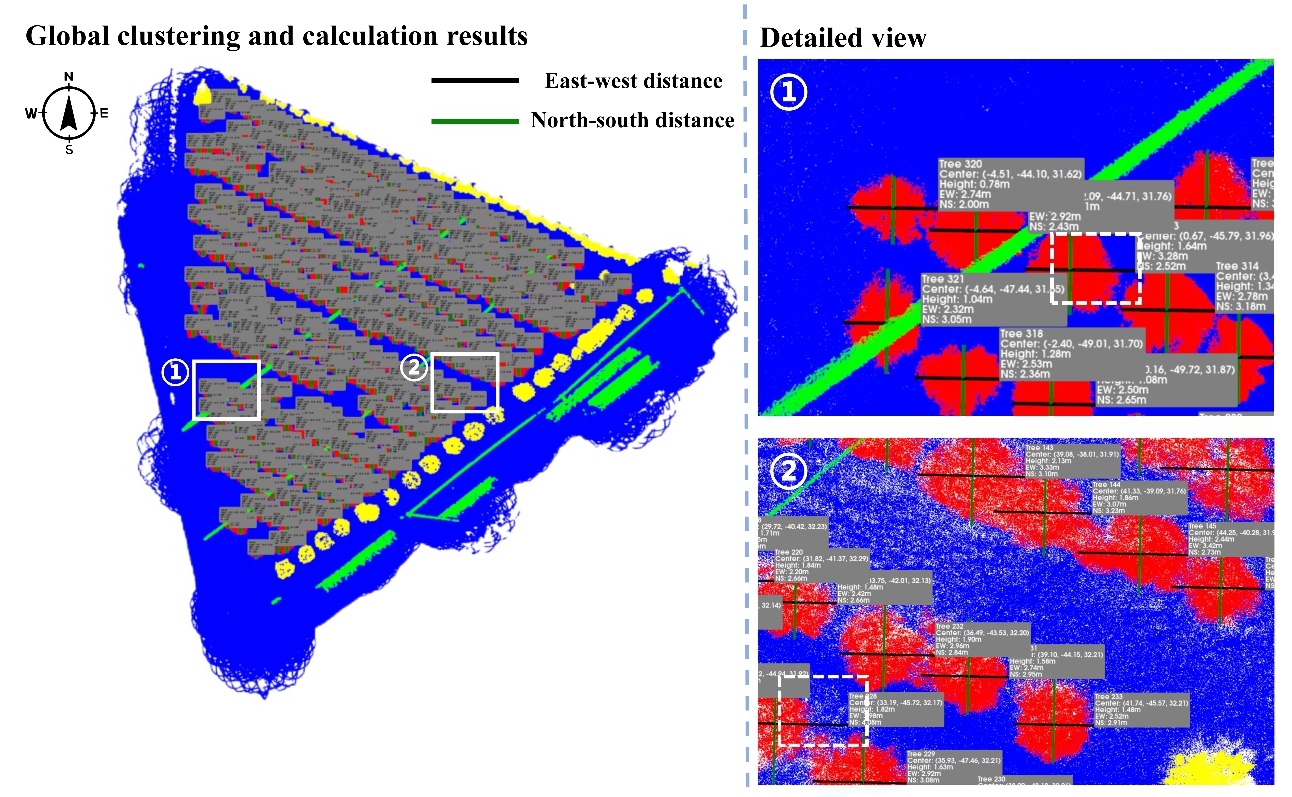
图7 果树聚类与参数提取结果
学校工程学院硕士研究生李斯培为论文第一作者,文晟教授为论文的通讯作者。该研究得到了国家自然科学基金(32271985)、广东省基础与应用基础研究基金(2022A1515011008)、广州市科技计划项目(2024B03J1268、2024E04J0232、2023B03J1362)的资助。
相关论文链接:https://doi.org/10.1016/j.compag.2025.111323
论文的实验系统与方法演示视频链接:https://www.bilibili.com/video/BV1n5JDzyEG6/?spm_id_from=333.1387.homepage.video_card.click
文图/工程学院
